
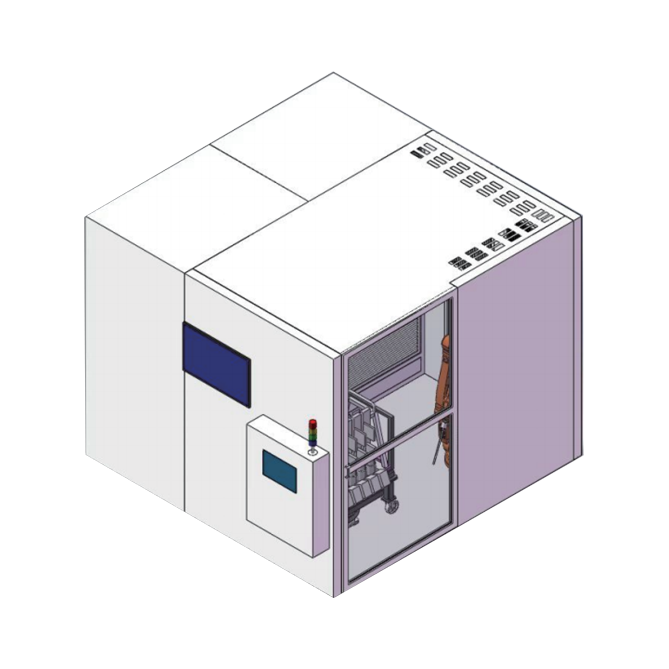
自动化表面主要解决于产品单一化,人工繁琐清洁,由机器人替代并解决人工清洁问题并有效提升产品质量和数量。有效解决人工成本。自动化除尘系统的设计,首先应著眼于污染源的有效控制。在目前常用的技术手段中,对污染源控制最有效的方法是尽可能将其封闭起来,类似于一个“密闭罩”。本项目拟设计的尘埃室为封闭,将元器件工件置于尘埃室内。根据已知的工艺条件,元器件工件尺寸大小不一,由插车推入尘埃室,由协作机器人完成表面清洁。
01
自动化表面主要解决于产品单一化,人工繁琐清洁,由机器人替代并解决人工清洁问题并有效提升产品质量和数量。有效解决人工成本。自动化除尘系统的设计,首先应著眼于污染源的有效控制。在目前常用的技术手段中,对污染源控制最有效的方法是尽可能将其封闭起来,类似于一个“密闭罩”。本项目拟设计的尘埃室为封闭,将元器件工件置于尘埃室内。根据已知的工艺条件,元器件工件尺寸大小不一,由插车推入尘埃室,由协作机器人完成表面清洁。
02
| 技术规格Technicalspecification | ZJVC11-ZDH |
| 功率(KW)Power | 11 |
| 电压(V) Voltage | 380V 50HZ/60HZ |
| 容量(L) Capacity | 100 |
| 吸入口径(MM)Suction diameter | 400 |
| 过滤精度(UM)Filtration accuracy | 0.3 |
| 气流量(M³/H) Gas flow rate | 12000 |
| 噪音(DB) Noise | 75 |
| 电源线长(M)The power cord is long | 8 |
| 重量(KG)weight | 220 |
| 气源压力(Mpa)Gas source pressure | 0.6Mpa≥工作值≥0.4Mpa |
| 尺寸(长*宽*高)Dimensions (Length*width *height) | 2500*3000*3000 |
| 清理方式 Cleaningmethod | 压差脉冲自动喷吹清灰/旋翼清灰机构 |
| 安全配置 Security configuration | 温度过高停机报警,风速监控,防呆措施,光栅感应 |
| 机械手选型 Selection ofmanipulator | ABB/发那科/遨游 |